欢迎浏览我公司网站!!


行业资讯
【中科大凸优化-7】凸优化问题的定义、基本概念及四条性质
时间: 2024-04-15浏览次数:
定义:一个优化问题可以表示为其中称为目标函数或者损失函数(若是最大化问题则称为效用函数),两个约束分别称为不等式约束和等式约束。定义:目标函数和所有约束函数定义域的交集称为域,即定义:域中所有满足约束条件的元素称为可行解(feasiblepoint),可行解组成的集合称为可行域(feasibl
定义:一个优化问题可以表示为
其中 称为目标函数或者损失函数(若是最大化问题则称为效用函数),两个约束分别称为不等式约束和等式约束。
定义:目标函数和所有约束函数定义域的交集称为域,即
定义:域中所有满足约束条件的元素称为可行解(feasible point),可行解组成的集合称为可行域(feasible set),即
定义: 称为问题的最优值(optimal value),若
,那么
称为优化问题的最优解(optimal point),最优解组成的组合称为最优解集
注意:当优化问题不可行时(可行域为空),最优值
定义: 称为优化问题的
次优解集
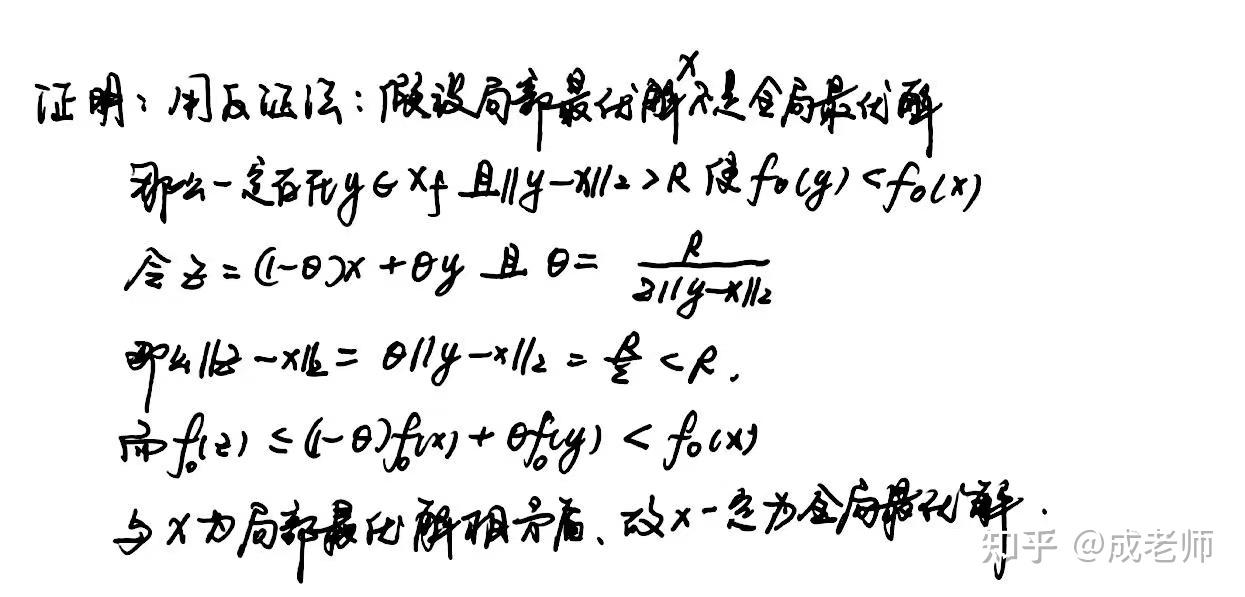
定义: 称为目标函数在
附近的局部最优解
定义:一个凸优化问题可写成如下标准形式
其中目标函数和不等式约束函数均为凸函数,同时等式约束 为仿射映射
定义:在上述定义的基础上,如果目标函数为拟凸函数,那么该优化问题就是一个拟凸优化问题
证明:
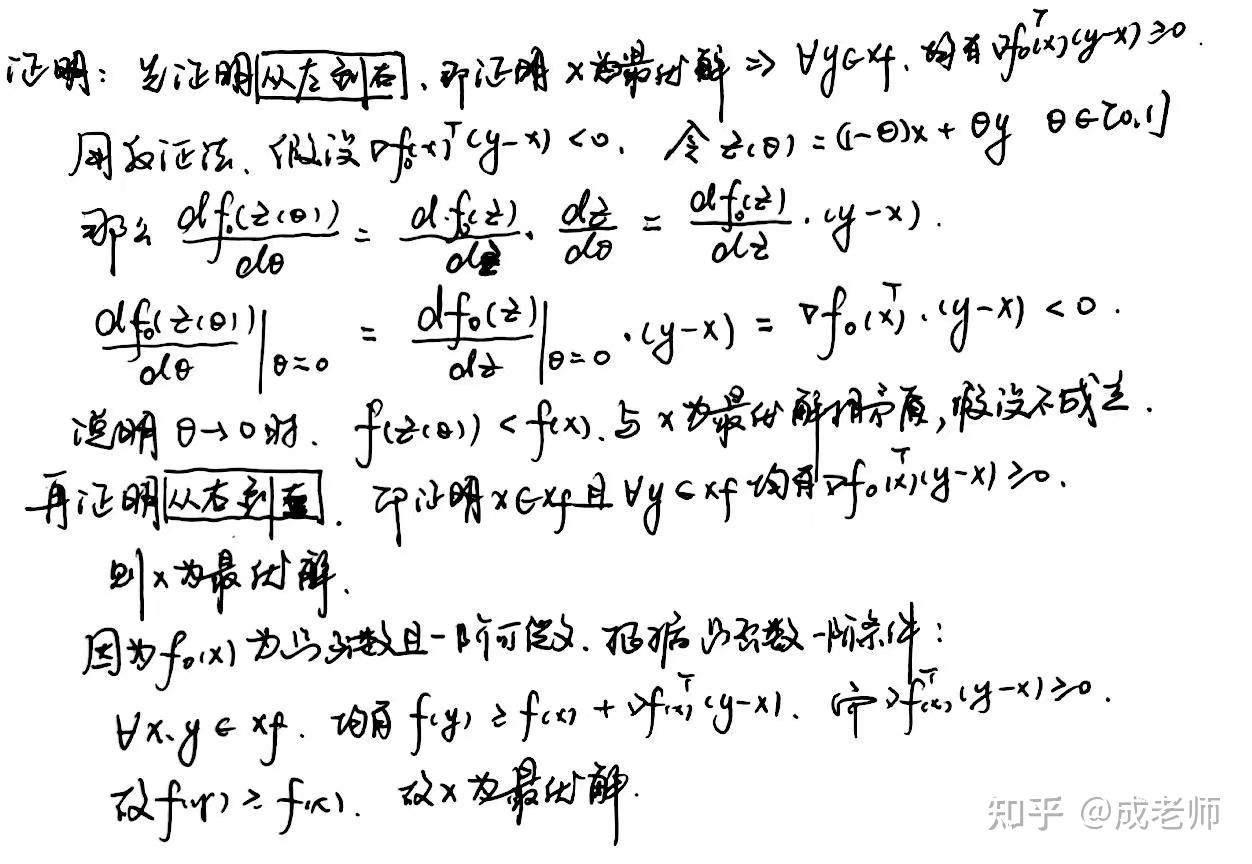
推论:对于目标函数一阶可微的凸优化问题,若 为最优解,则
且对于任意的
均有
,反之亦成立
说明:即可行域一定在下图中实线所定义的超平面的同一侧

证明:
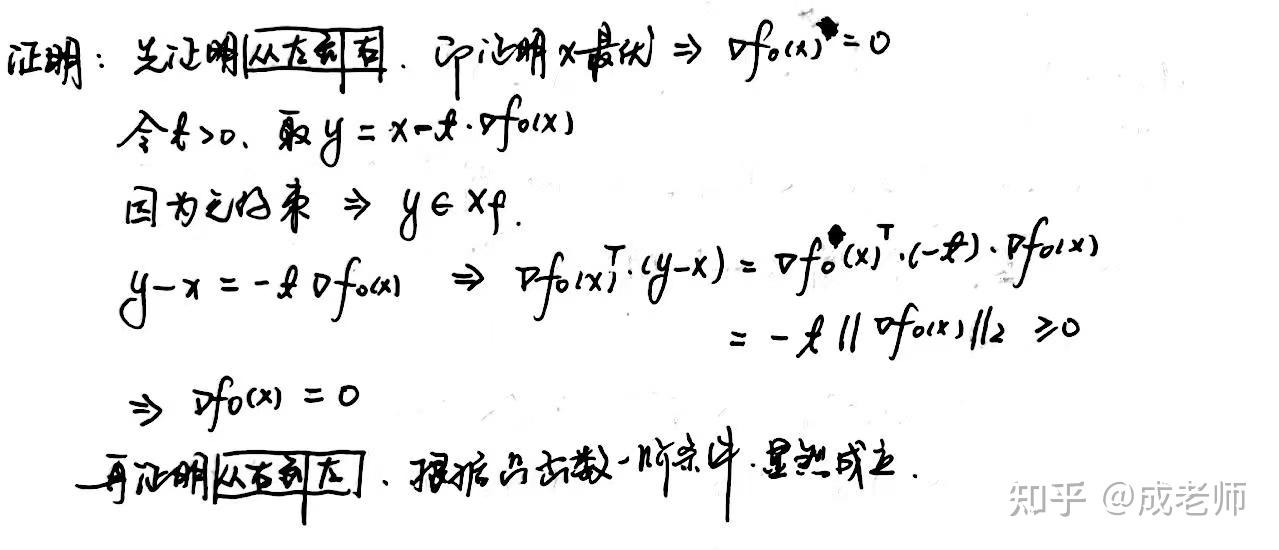
推论:对于无约束条件的凸优化问题, 为最优解等价于
证明:
推论:对于仅有等式约束的凸优化问题
若可行域非空且最优解为 ,那么对于任意的
,均有
证明:

推论:对于仅有非负约束的凸优化问题
若可行域非空且最优解为 ,那么
,即
和
中至少有一个为零
证明:



